
DELMIA Robotics操作教程|机器人动作创建和示教(七)
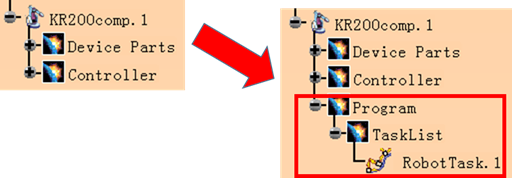
1、机器人任务创建
鼠标点击Sequence工具条上 ![]()
然后点击需要建立任务的机器人3D模型或点击PPR树中的机器人,会在机器人结构树中增加出Program\TaskList\RobotTask.1
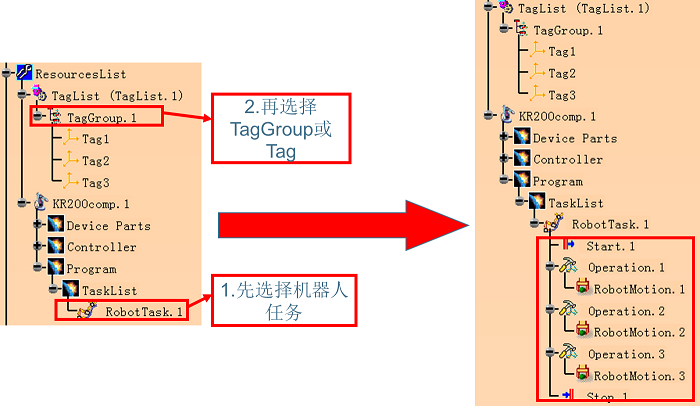
2、将Tag分配到机器人任务
鼠标点击Sequence工具条上
注意:
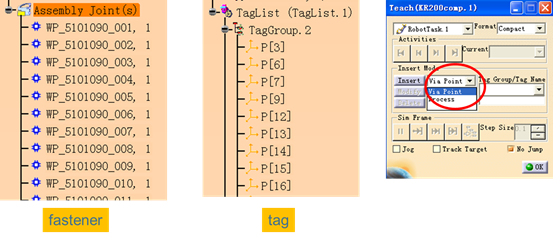
1).通过
 建立机器人任务,当选择fastener(CATIA白车身设计模块所设计的焊点)和tag的时候,fastener(焊点)所创建的是Process而tag创建的是Via point;
建立机器人任务,当选择fastener(CATIA白车身设计模块所设计的焊点)和tag的时候,fastener(焊点)所创建的是Process而tag创建的是Via point; 2).Process点是可以插入焊接抓取零件等任务,而Via point是不可以插入;
3).可通过Teach命令将Tag点的属性改为Process 就可以插入相关任务;
3、修改RobotTask属性
鼠标右键点击RobotTask,选择Properties,弹出属性窗口,可修改任务名称等信息

4、机器人示教
1).点击Robot Management工具条,此点击
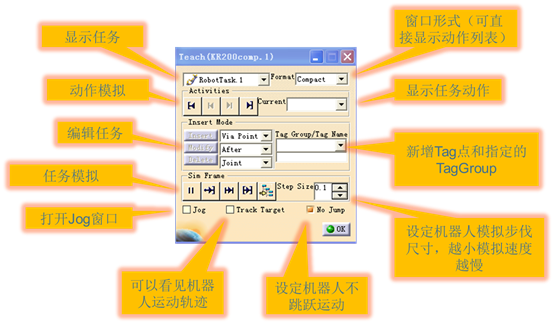
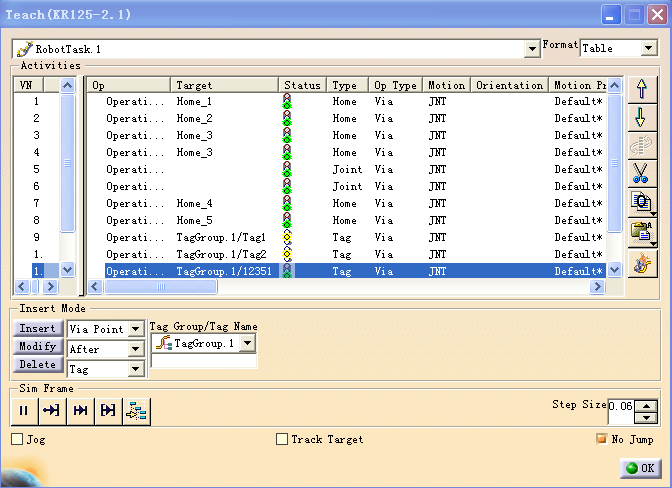
2).一般使用Table模式,通过Teach对话框进行机器人任务调整和优化或插入动作;
3).插入焊接动作
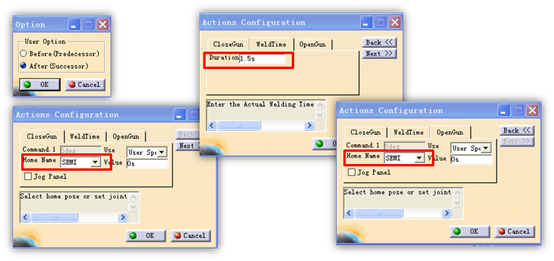
点击Action Library工具条中
插入焊接任务弹出Option对话框选择插入的动作之前或之后,点击OK 弹出Actions Configuration对话框,CloseGun选项设定焊钳关闭位置,在Home Name下来菜单选择焊枪关闭状态;WeldTime选项中设定焊接时间;在OpenGun选项设定焊枪打开位置,在Home Name下来菜单中设置;
5、示教完成后,可以模拟运行机器人动作
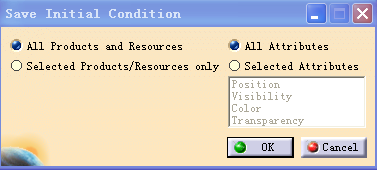
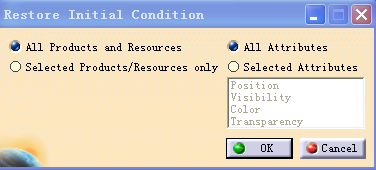
1).保存初始状态
一个程序运行之前需要确定一个起始状态;将资源和产品等位置和状态调整到起始状态,然后点击Simulation工具条下
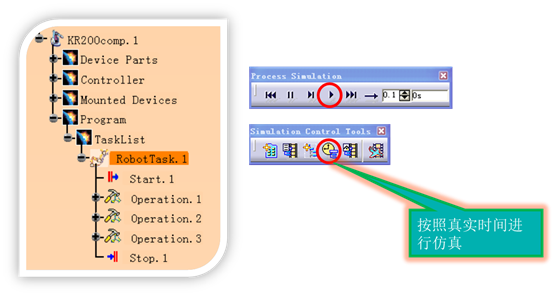
2).机器人任务模拟![]()
选择Simulation工具条中 然后从PPR树中选择Robot Task会弹出Process Simulation和Simulation Control Tools工具条;点击Process Simulation工具条中
然后从PPR树中选择Robot Task会弹出Process Simulation和Simulation Control Tools工具条;点击Process Simulation工具条中 进行模拟;点击Process Simulation工具条右上角
进行模拟;点击Process Simulation工具条右上角 退出模拟状态;
退出模拟状态;
更多教程干货分享可关注以 下:
广州强互微信官方公众号


