
DELMIA Robotics操作教程|机器人焊枪安装(五)
本章节介绍如何把焊枪安装在机器人上。
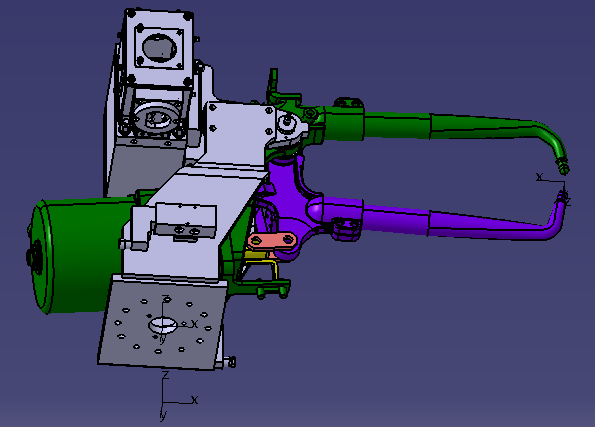
1、切换到“Device Task Definition”模块,使用“Insert Resource”  命令插入机器人焊枪,焊枪数模如下:
命令插入机器人焊枪,焊枪数模如下:
2、点击工具条
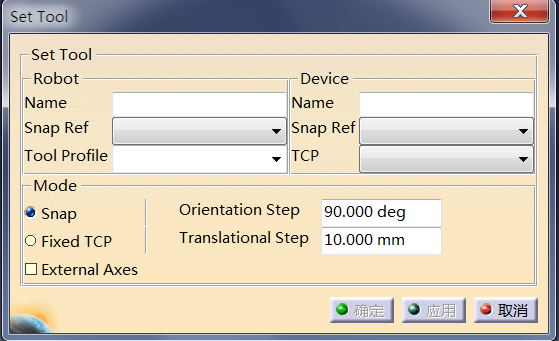
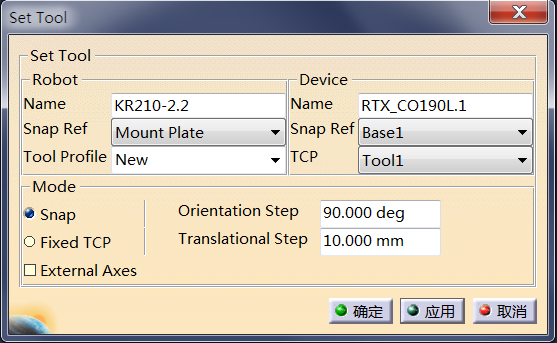
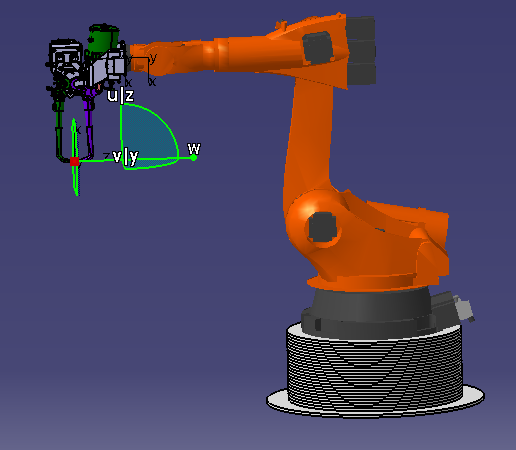
3、点击左侧浏览树中的机器人KR210-2.2,然后再点击插入的焊枪“RTX_CO190L”,对话框中Robot、Device功能区下出现相关数据显示,如下图所示:
点应用,工具切换盘就被安装在机器人第6轴的法兰处
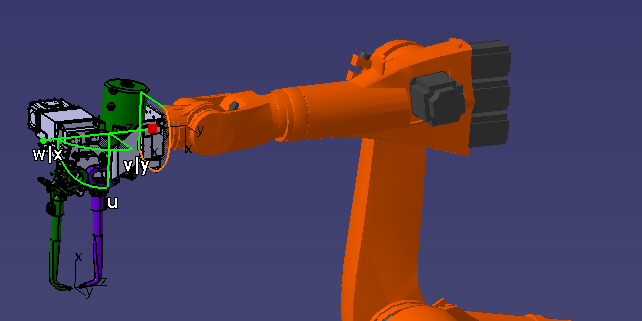
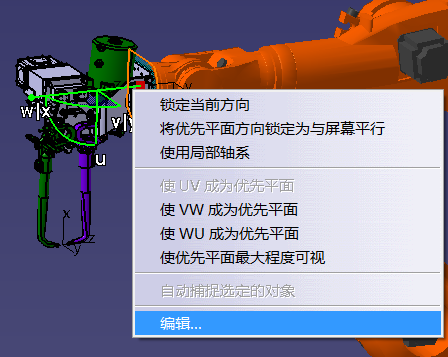
如安装到机器人法兰上的角度不正确,可用鼠标拖动指针点住焊枪处的绿色罗盘绕W轴旋转的曲线,顺时针或逆时针旋转90度,也可以在罗盘上点右键,使用指南针参数来调整角度。
角度调整正确后,点确定,焊枪就安装在机器人上了。
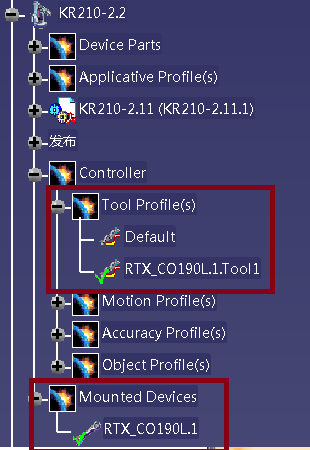
4、在PPR树上的机器人节点下会多出Mount Device节点,可以看到被挂接的焊枪,在Contorller下的tool参数下会多出焊枪的TCP坐标
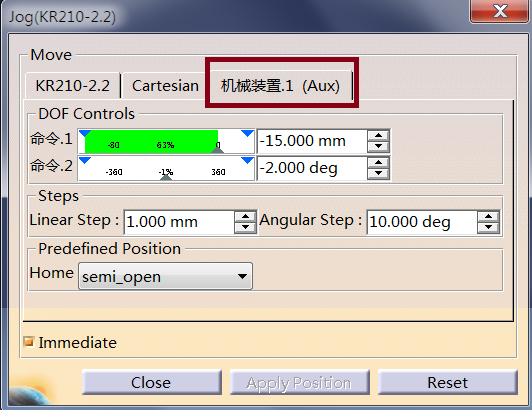
5、击Robot Management工具条中的“Jog a device”  命令按钮,点击左侧浏览树中的机器人KR210-2.2,弹出手动机器人对话框,
命令按钮,点击左侧浏览树中的机器人KR210-2.2,弹出手动机器人对话框,
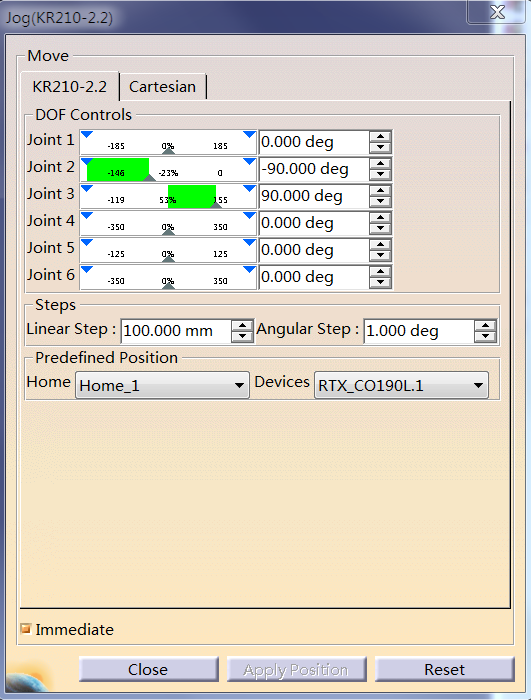
可以看到TCP已切换至焊枪的TCP上了。
注意:
(1)当使用固定焊枪时,Mode为Fixed TCP,
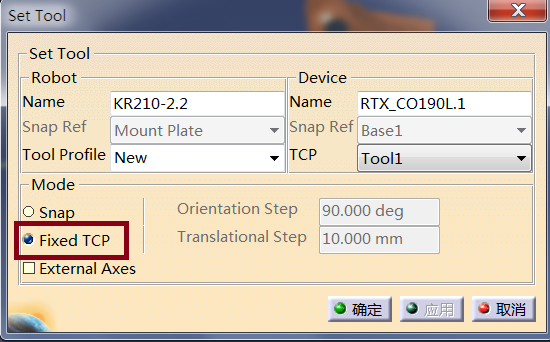
(2) 在进行焊枪安装时,Set Tool对话框中External Axes(外部轴)选择与否的区别:当焊枪是气动焊枪时,可以不勾选。当焊枪是伺服焊枪时,则可以勾选此选项。若是不勾选此选项,则在机器人手动运动对话框中,将没有“机械装置.1(Aux)”属性标签。
更多教程干货分享可关注一下:
广州强互微信官方公众号


