
DELMIA Robotics操作教程|机器人工作站创建(四)
1、新建Product文档,命名为Station.Product,保存
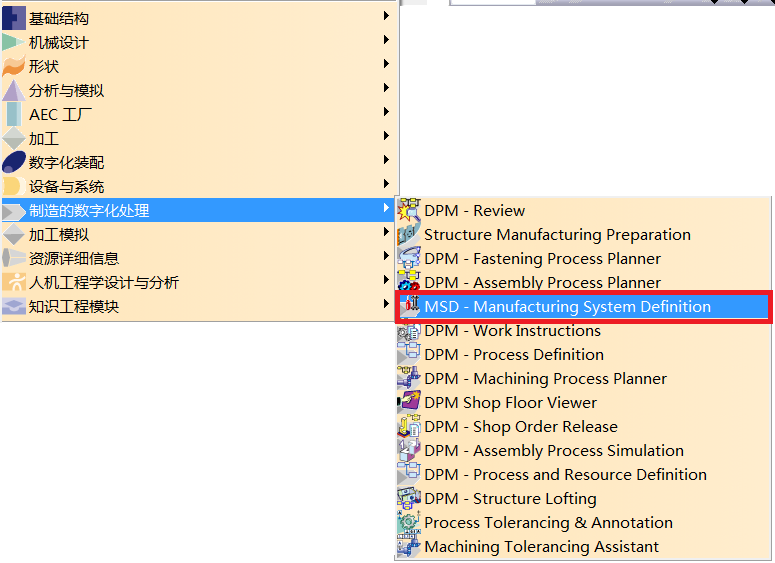
2、切换至制造的数字化处理-MSD-Manufacturing System Definition模块
3、点击“Insert Resource”命令,插入![]() 保存的Station.Product文件
保存的Station.Product文件
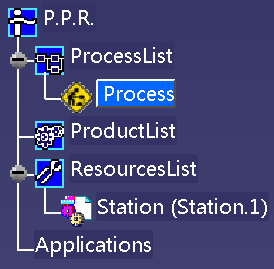
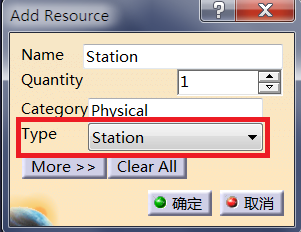
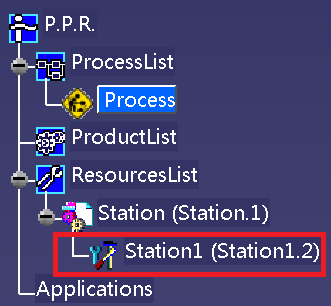
4、点击“Create Resource in PPR”,在PPR树上单击Station(Station.1)节点,跳出如下窗口,类型(type)选Station类型
结果如下图示:
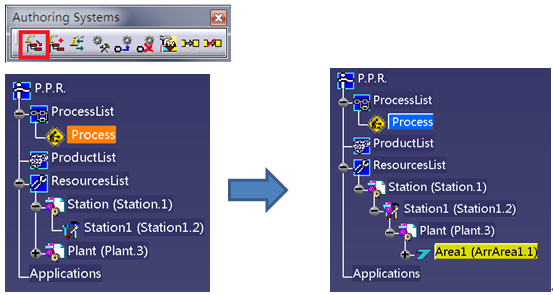
5、使用“Insert Resource”  命令,插入已保存的Plant.Product文件
命令,插入已保存的Plant.Product文件
再使用“AuthoringSystems”命令条下的”Reparent Resource”命令,把plant节点调整到Station1(Station1.2)节点下,结果如下图:
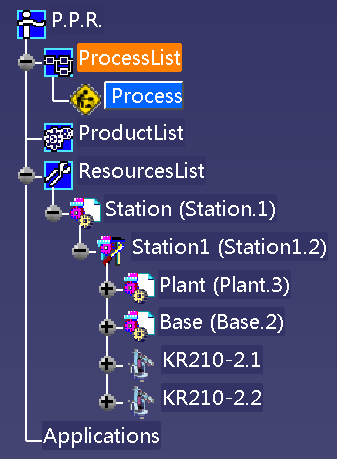
6、重复步骤4,分别插入Base(机器人基座)和Robot
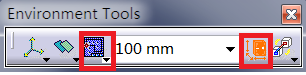
7、切换到“Device Task Definition”模块下,环境工具按下图设定
8、点击”Snap Resource to where by using position toolbar” 命令![]() ,弹出Snap Options 窗口勾选两项
,弹出Snap Options 窗口勾选两项![]()
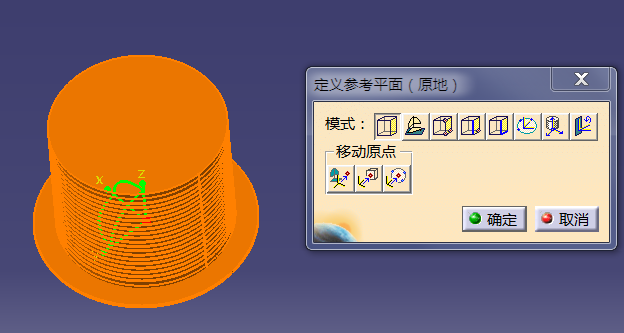
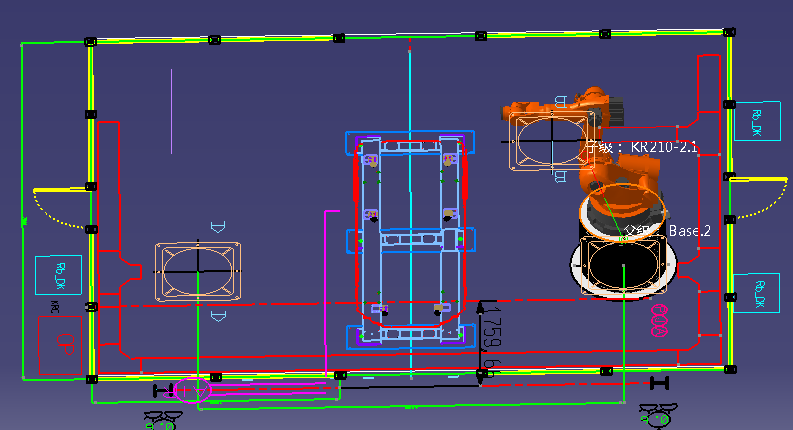
在PPR结构树上单击Base节点,弹出定义参考平面(原地)对话框,同时会在Base的底部(Base坐标)处出现绿色坐标。
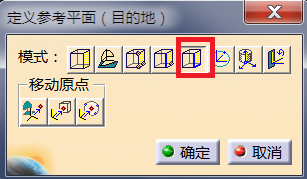
点确定,然后点击Plant中的2D布局图,出现定义参考平面窗口,模式选 “p定义直线-直线平面”
在2D布局图中选Base位置上的两条直线,出现绿色坐标
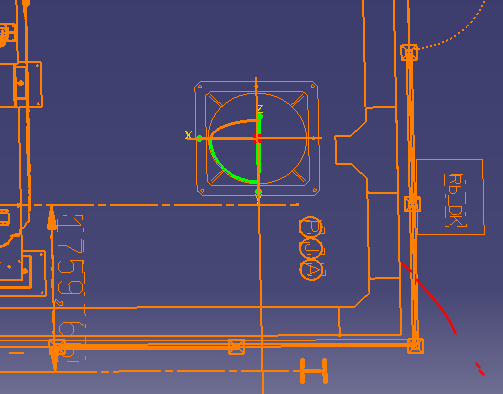
点确定后,Base就会被定位到2D布局图上
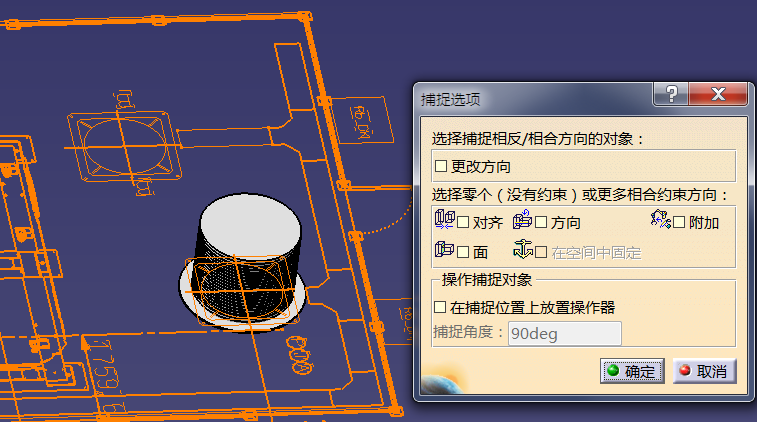
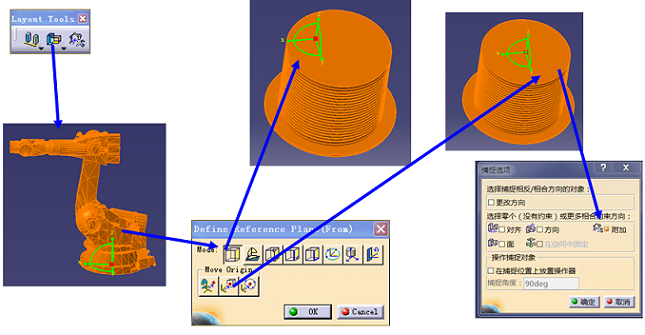
9、使用同样方法,把机器人摆放至Base上在面。
点击Layout Tools工具条上 ,选择机器人,点击OK;然后选择需要安装机器人的物体,选择在弹出窗口的
,选择机器人,点击OK;然后选择需要安装机器人的物体,选择在弹出窗口的 ,选取需要的平面,然后点击
,选取需要的平面,然后点击 选择表面中心点,将机器人移动到底座上,点击OK弹出Snap Options菜单,选上“附加选项”, 点击OK。
选择表面中心点,将机器人移动到底座上,点击OK弹出Snap Options菜单,选上“附加选项”, 点击OK。
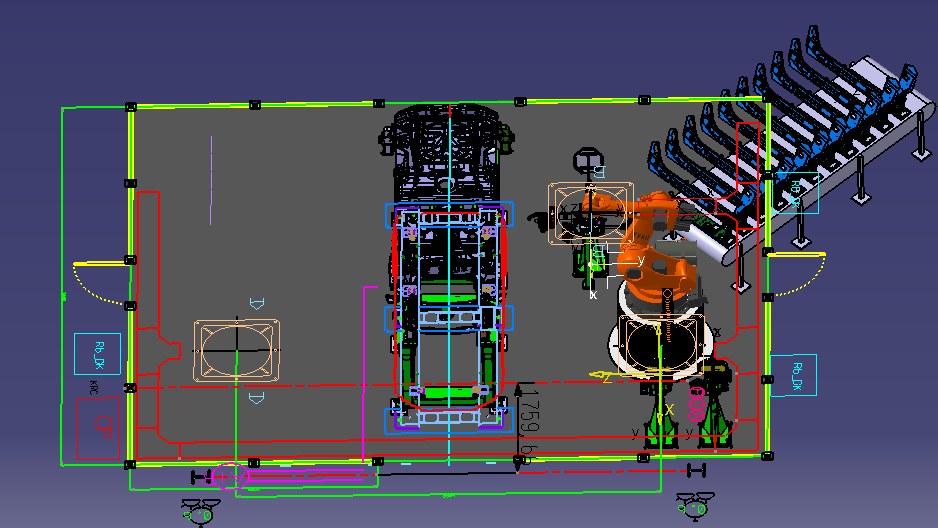
10、依次插入焊枪架、产品、工装等,最终的布局结果如下图:
更多教程干货分享可关注一下:
广州强互微信官方公众号


