DELMIA Robotics操作教程|X型焊枪机构创建及参数设定(二)
1、数模处理
打开焊枪数模,切换到DELMIA的Device Buliding模块
根据焊枪机构运动关系,对数模进行拆分。一般X型焊枪分为静电极臂、动电极臂、伺服电机、传动连杆、静电极冒和动电极冒,如下图所示:
2、2、焊接运动机构分析
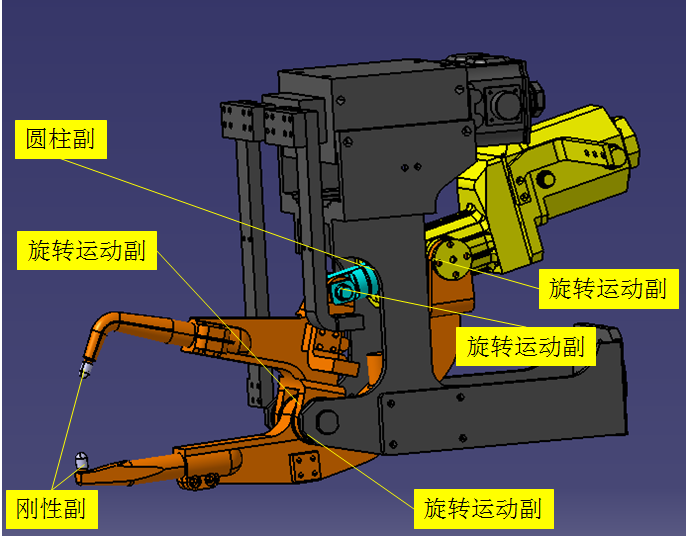
根据X焊枪的运动关系,需要用到的运动副如下图示:
3、
3、创建焊接机构
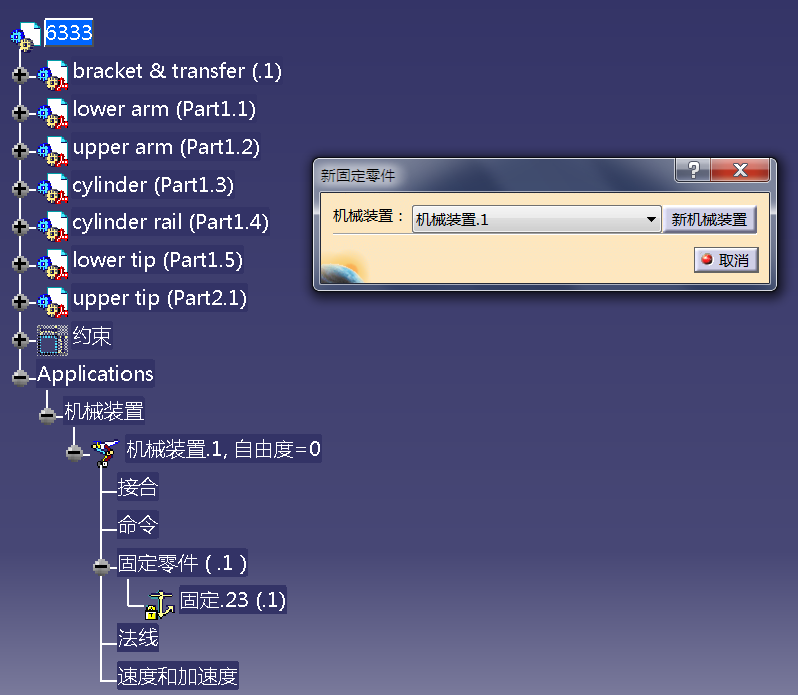
3.1在DELMIA中机构创建与CATIA DMU相同。首先创建机械装置与固定零件,创建完成后会在特征树Application节点下显示:
3.2 ![]()
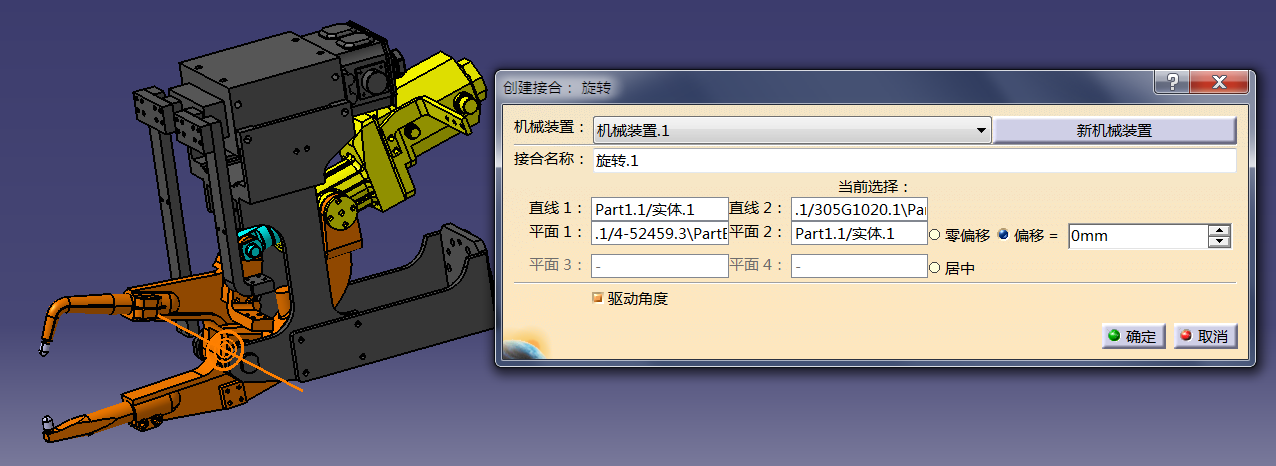
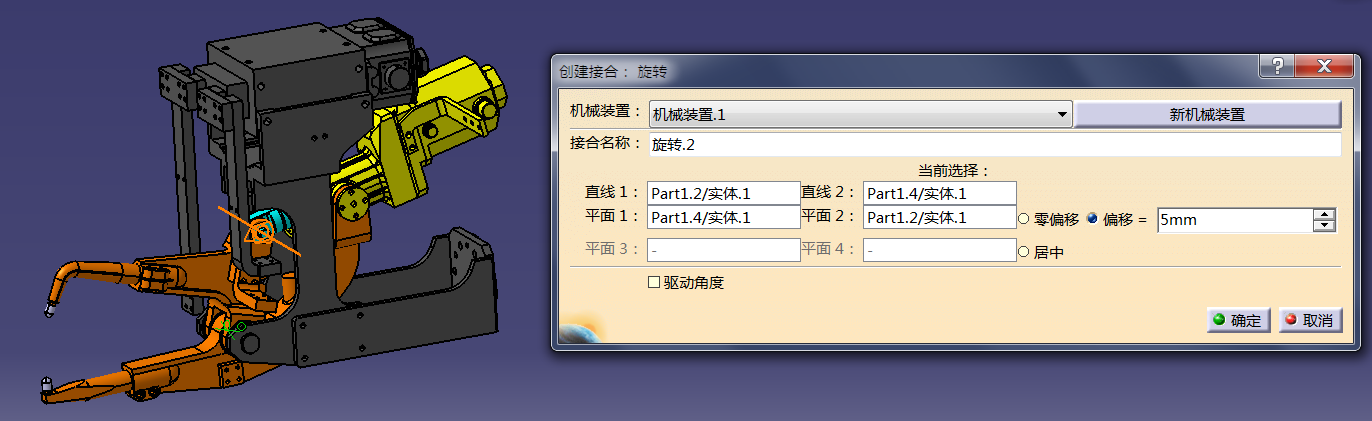
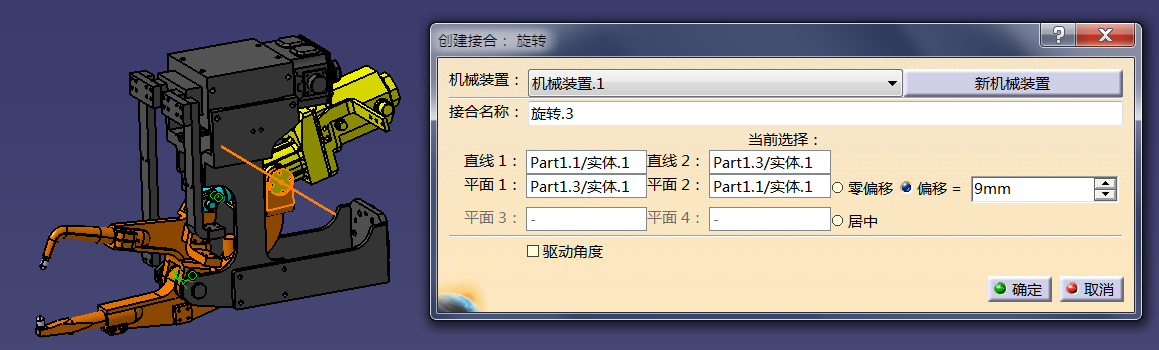
3.2.1点击“Revolute Joint”,命令图标,分别创建旋转运动副,并在下臂与静电极臂之间的旋转副添加角度驱动命令
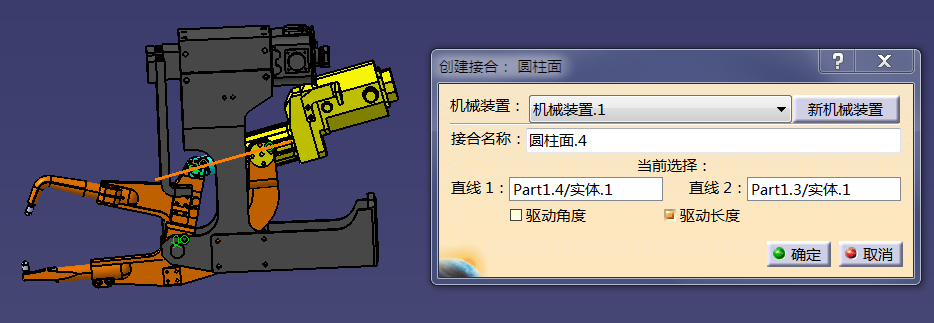
3.2.2点击Cylindrical Joint命令图标,创建圆柱运动副,并添加长度驱动命令:
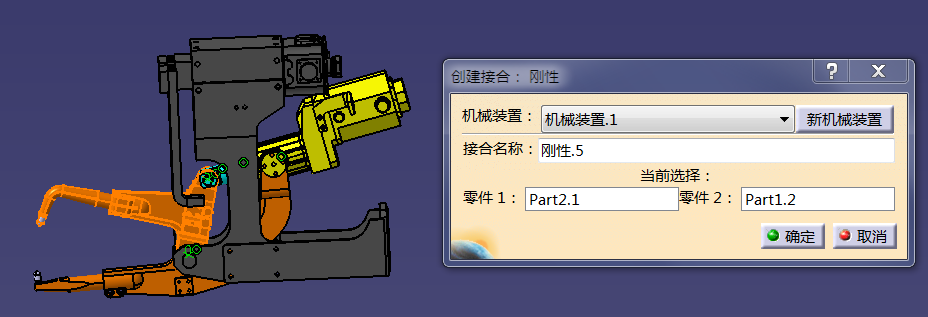
点击Rigid Joint命令图标,创建两个电极冒与上下臂的刚性副

创建结果如下;
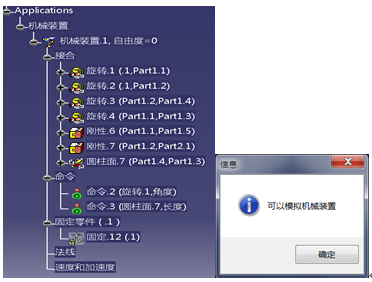
跳出可以模拟机构装置信息后,就可以对焊枪进行机构模拟了。
4、焊枪参数设定
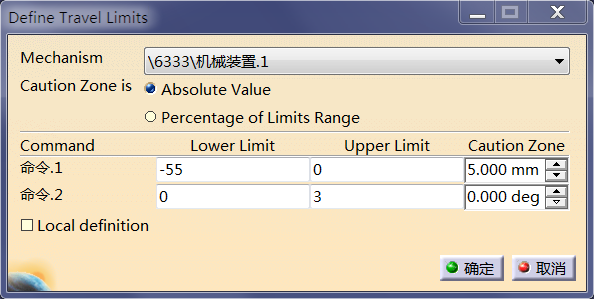
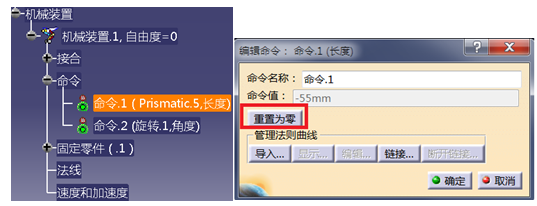
4.1气缸行程极限及静电极臂转动极限
Lower Limit-55~0mm为气缸的行程,0-3deg为静电极臂的可调整解度。
可以使用双击驱动命令,调整零位
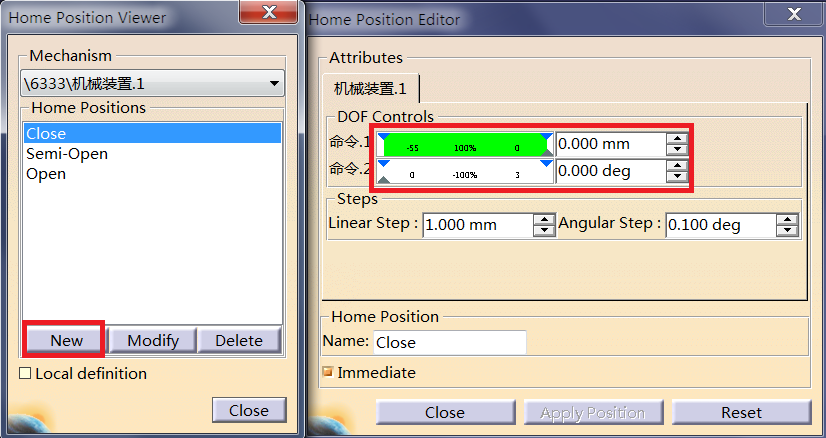
4.2点击右侧的“Home Positions” 命令图标,为焊枪设定开合运动状态:Close,Semi-Open,Open
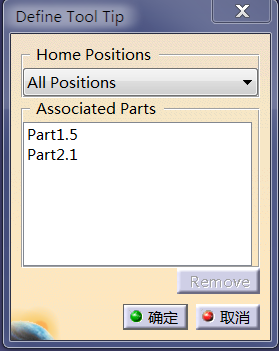
4.3,电极冒设定
在焊枪实际工作中,电极冒与钣件接触是设定为非干涉状态的,需使用Define Too Tip,命令把电极冒定义为Associated Parts
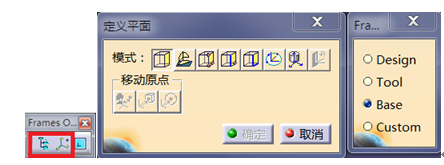
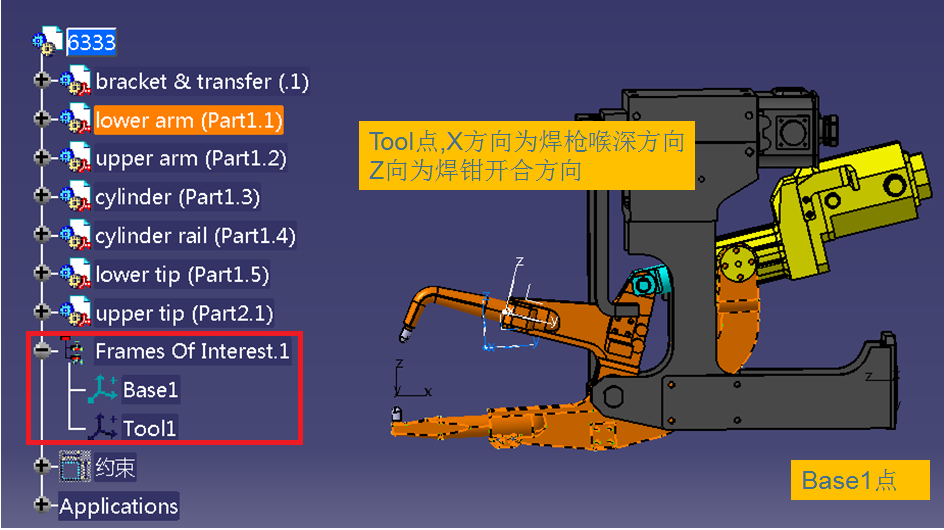
4.4创建焊枪Base及Tool坐标
首先在特征树上建立Frames Of Interest节点, 然后使用Frame Type命令建立Base坐标,注意坐标类型选择Base,坐标位置为焊枪与机器人的安装位置法兰,坐标的Z向与法兰垂直且指向焊枪电极臂方向,Tool点的设定方法与Base基本一致,坐标类型需要选择为Tool类型,X方向设定为焊枪喉深方向,Z向为焊枪开合方向。设定结果如下图示:
5、焊枪设定完成后,就可以使用Jog Mechanism命令焊枪动作进行仿真