
DELMIA Robotics操作教程|DELMIA软件环境设定(一)
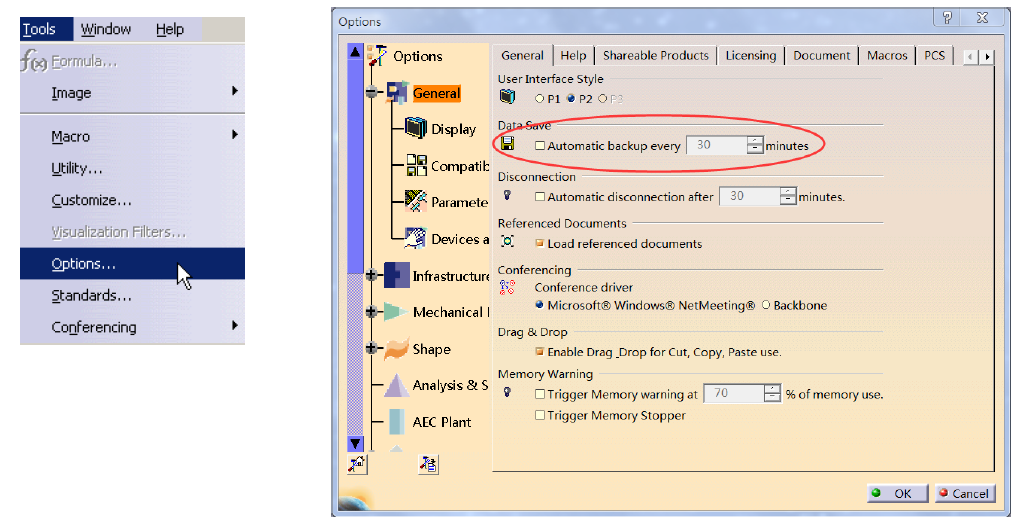
1、 启动DELMIA V5软件,菜单“Tools-Option”,选择“General”,在Data Save选项中去掉“Automatic Save(自动备份)”
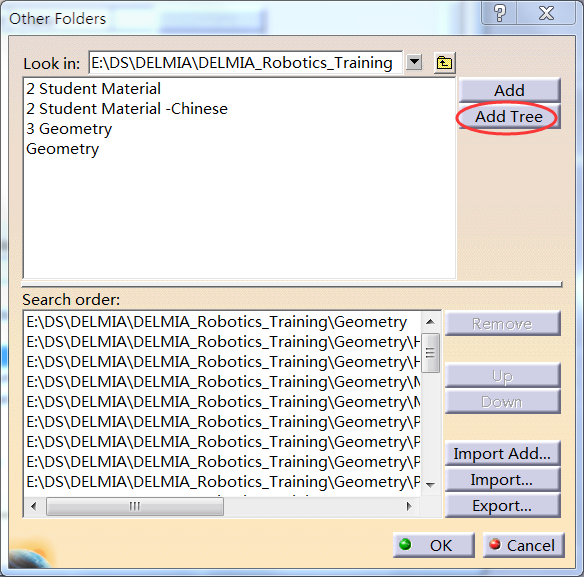
2、 在Document 按扭中点击 Other folders 选项,单击Configure按钮.在Other Folders窗口中, 查找项目并使用Add Tree按扭添加路径,点OK完成设定。
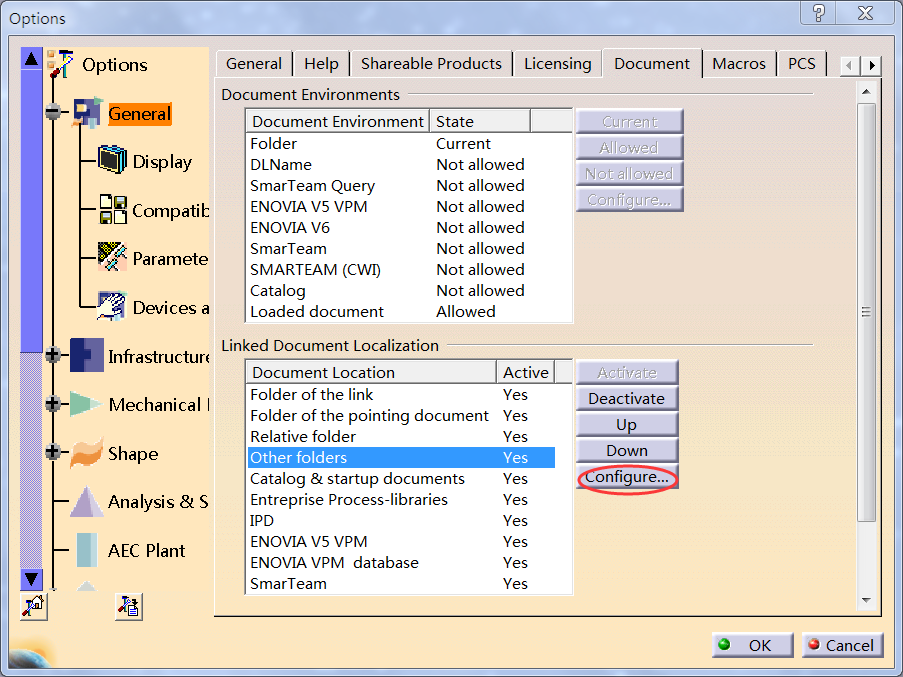
注: 使用Other Folders工具, 能够对指定项目内部的子文档与父文档进行链接 (打开一个Process,如出现内部子文档无法加载,是由于原路径不符,无法链接内部子文档,通过加载可以将内部子文档进行链接)。
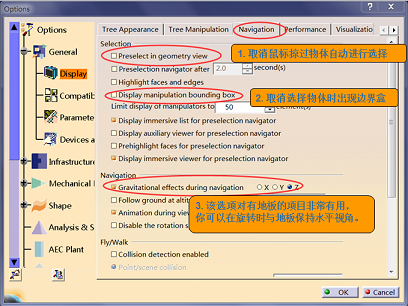
3、 在Display中点击 Navigation:
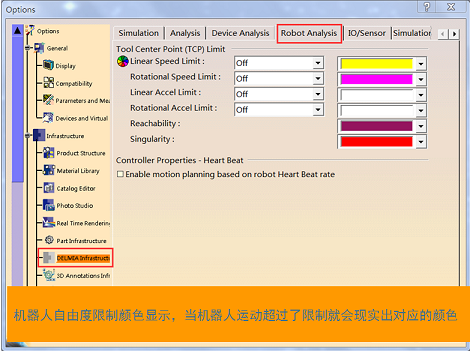
4、在Infrastructure-Infrastructure:运动机构工具中心点(TCP)在仿真过程中超限时会以不同的颜色显示
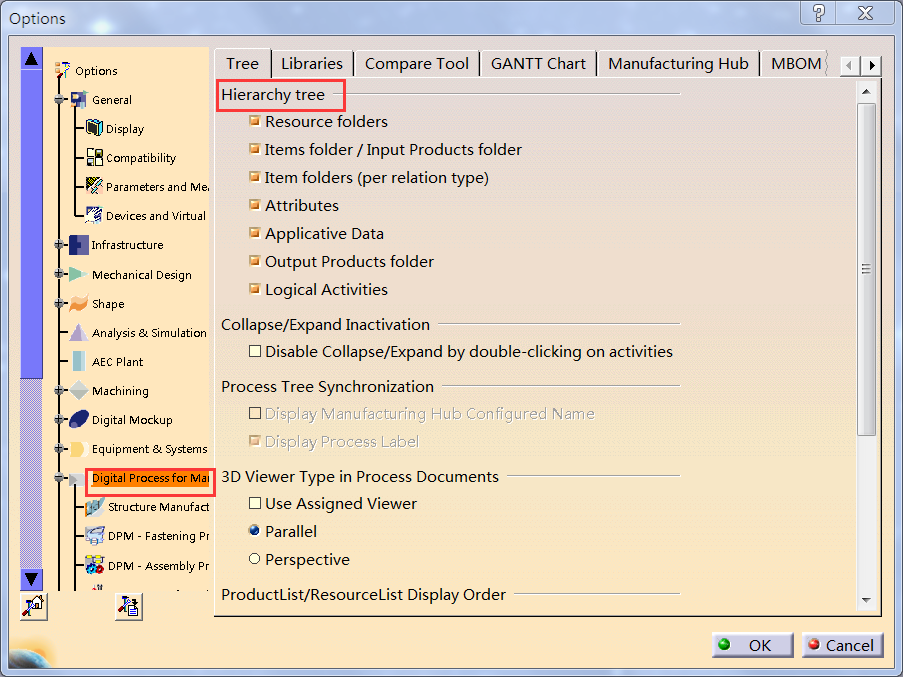
5、 Digital Process Manufacturing选项中,选上Tree/Hierarchy tree下面所有复选框
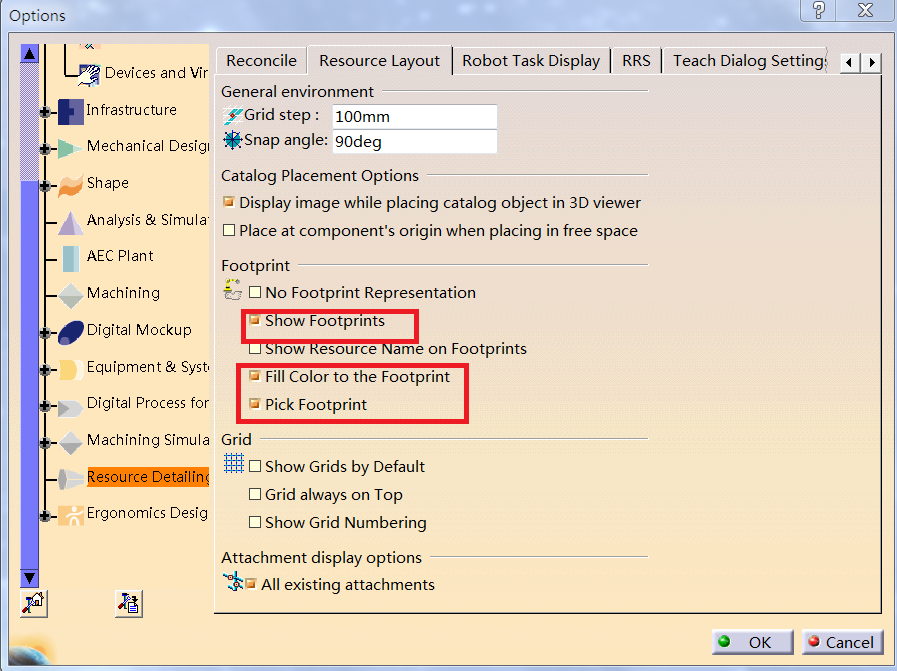
6、Resource Detail/Resource Layout窗口设定如下:
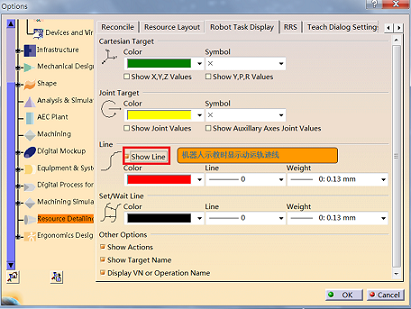
7、Resource Detail / Robot Task Display窗口设定如下:
以上环境设定为使用DELMIA进行机器人仿真的基本环境,后继进行多工位仿真及离线编程时,还需要有特殊的一些设计。基本环境设定完成后,我们就可以使用DELMIA机器人仿真模块开始我们的设计工作了。
更多教程干货分享可关注以下:
广州强互微信官方公众号


